Mohammad Ali Zamani
Mohammad Ali Zamani
Home
Experience
Publications
Projects
Teaching
Trainings
Posts
Outreach
Talks/Workshops
Contact
Light
Dark
Automatic
Publications
Type
Conference paper
Date
2019
2018
2017
2013
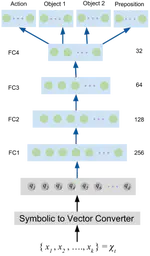
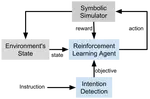
Deep reinforcement learning using compositional representations for performing instructions
Mohammad Ali Zamani*
,
Sven Magg
,
Cornelius Weber
,
Di Fu
,
Stefan Wermter
Incorporating End-to-End Speech Recognition Models for Sentiment Analysis
Egor Lakomkin*
,
Mohammad Ali Zamani*
,
Cornelius Weber
,
Sven Magg
,
Stefan Wermter
Neural End-to-End Learning of Reach for Grasp Ability with a 6-DoF Robot Arm
Hadi Beik-Mohammadi
,
Matthias Kerzel
,
Michael Goerner
,
Mohammad Ali Zamani*
,
Manfred Eppe
,
Stefan Wermter
On the Robustness of Speech Emotion Recognition for Human-Robot Interaction with Deep Neural Networks
Egor Lakomkin*
,
Mohammad Ali Zamani*
,
Cornelius Weber
,
Sven Magg
,
Stefan Wermter
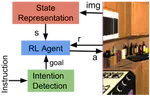
Language-modulated Actions using Deep Reinforcement Learning for Safer Human-Robot Interaction
Mohammad Ali Zamani*
,
Sven Magg
,
Cornelius Weber
,
Stefan Wermter
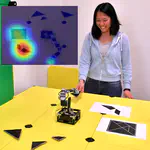
Learning Spatial Representation for Safe Human-Robot Collaboration in Joint Manual Tasks
Mohammad Ali Zamani*
,
Hadi Beik-Mohammadi
,
Matthias Kerzel
,
Sven Magg
,
Stefan Wermter
EmoRL: Real-time Acoustic Emotion Classification using Deep Reinforcement Learning
Egor Lakomkin*
,
Mohammad Ali Zamani*
,
Cornelius Weber
,
Sven Magg
,
Stefan Wermter
Language-modulated Safer Actions using Deep Reinforcement Learning
Mohammad Ali Zamani*
,
Sven Magg
,
Cornelius Weber
,
Stefan Wermter
Accelerating Deep Continuous Reinforcement Learning through Task Simplification
Hadi Beik-Mohammadi
,
Matthias Kerzel
,
Mohammad Ali Zamani*
,
Stefan Wermter
Simultaneous Human-Robot Adaptation for Effective Skill Transfer
Mohammad Ali Zamani*
,
Erhan Oztop
Deep Reinforcement Learning using Symbolic Representation for Performing Spoken Language Instructions
Mohammad Ali Zamani*
,
Sven Magg
,
Cornelius Weber
,
Stefan Wermter
An example conference paper
Lorem ipsum dolor sit amet, consectetur adipiscing elit. Duis posuere tellus ac convallis placerat. Proin tincidunt magna sed ex sollicitudin condimentum.
Mohammad Ali Zamani
Cite
×