Mohammad Ali Zamani
Mohammad Ali Zamani
Home
Experience
Publications
Projects
Teaching
Trainings
Posts
Outreach
Talks/Workshops
Contact
Light
Dark
Automatic
demos
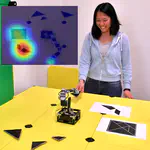
Learning Spatial Representation for Safe Human-Robot Collaboration in Joint Manual Tasks
Mohammad Ali Zamani*
,
Hadi Beik-Mohammadi
,
Matthias Kerzel
,
Sven Magg
,
Stefan Wermter
EmoRL: Real-time Acoustic Emotion Classification using Deep Reinforcement Learning
Egor Lakomkin*
,
Mohammad Ali Zamani*
,
Cornelius Weber
,
Sven Magg
,
Stefan Wermter
Simultaneous Human-Robot Adaptation for Effective Skill Transfer
Mohammad Ali Zamani*
,
Erhan Oztop
Cite
×