Mohammad Ali Zamani
Mohammad Ali Zamani
Home
Experience
Publications
Projects
Teaching
Trainings
Posts
Outreach
Talks/Workshops
Contact
Light
Dark
Automatic
Reinforcement Learning
Deep reinforcement learning using compositional representations for performing instructions
Mohammad Ali Zamani*
,
Sven Magg
,
Cornelius Weber
,
Di Fu
,
Stefan Wermter
Neural End-to-End Learning of Reach for Grasp Ability with a 6-DoF Robot Arm
Hadi Beik-Mohammadi
,
Matthias Kerzel
,
Michael Goerner
,
Mohammad Ali Zamani*
,
Manfred Eppe
,
Stefan Wermter
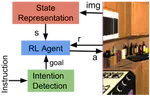
Language-modulated Actions using Deep Reinforcement Learning for Safer Human-Robot Interaction
Mohammad Ali Zamani*
,
Sven Magg
,
Cornelius Weber
,
Stefan Wermter
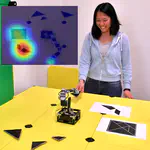
Learning Spatial Representation for Safe Human-Robot Collaboration in Joint Manual Tasks
Mohammad Ali Zamani*
,
Hadi Beik-Mohammadi
,
Matthias Kerzel
,
Sven Magg
,
Stefan Wermter
EmoRL: Real-time Acoustic Emotion Classification using Deep Reinforcement Learning
Egor Lakomkin*
,
Mohammad Ali Zamani*
,
Cornelius Weber
,
Sven Magg
,
Stefan Wermter
Language-modulated Safer Actions using Deep Reinforcement Learning
Mohammad Ali Zamani*
,
Sven Magg
,
Cornelius Weber
,
Stefan Wermter
Accelerating Deep Continuous Reinforcement Learning through Task Simplification
Hadi Beik-Mohammadi
,
Matthias Kerzel
,
Mohammad Ali Zamani*
,
Stefan Wermter
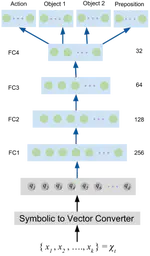
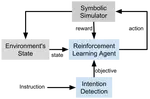
Deep Reinforcement Learning using Symbolic Representation for Performing Spoken Language Instructions
Mohammad Ali Zamani*
,
Sven Magg
,
Cornelius Weber
,
Stefan Wermter
Cite
×