Mohammad Ali Zamani
Senior Machine Learning Applied Scientist
HITeC
Biography
I am a Senior Machine Learning Applied Scientist at Hamburg Informatics Technology Center (HITeC) and a Research Associate at University of Hamburg. I am passionate to find scalable solutions based on deep learning for industrial problems. My research focus has been on deep (reinforcement) learning including explainability and its applications in robotics, dialogue management systems, and planning. I am also interested in AutoML as a path to reach a scalable artificial intelligence solution.
- Deep Reinforcement Learning
- Computer Vision
- Natural Language Processing
- Explainable AI
- AutoML
-
Ph.D. Fellow in Computer Science
University of Hamburg, Germany
-
M.Sc. in Computer Science, 2015
Ozyegin University, Istanbul, Turkey
-
B.Sc. in Electrical Engineering (Major of Control Engineering), 2009
University of Tehran, Iran
Experience
- Project lead on depth estimation from monocular and 360 images using deep learning.
- Deep learning consultant for our partner companies.
- Developing explainable AI approaches to emergency-landing for drones.
- Developed deep learning models to estimate device measurements from images.
- Developed deep learning models to detect defects on products from images.
- Developed depth estimation models from monocular images using deep learning.
- Presenting workshops and tutorials about deep learning and AutoML.
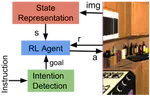
- Developing state representation for DRL in action planning.
- Developed DRL for visuomotor and dynamics in robots.
- Developed low-latency continuous emotion recognition using DRL.
- Improved robustness of emotion recognition on robots by incorporating spoken language and data augmentation.
- Worked on personalized dialogue systems with dynamic preference using deep reinforcement learning.
In cooperation with the Greater Tehran Electrical Distribution Company:
- Developed expert system to adjust the level of automation using machine learning algorithms (especially, neural network).
- Proposed decision-making approach for IT infrastructure selection in the smart grid.
- Implemented a fault diagnosis in smart grids using neural networks.
Recent Publications




Projects







Teaching and Advising
Advisor
- MSc Thesis: Explaining Deep Reinforcement Learning policies via Reward Decomposition
- MSc Thesis: Adapting to User Context in a Reinforcement Learning-based Dialogue System
- MSc Thesis: Reinforcement Learning for Incremental Dialogue Management
- MSc Thesis: Knowledge Extraction from API Reference Documentation Using Deep Learning
- Seminar Project: Deep Reinforcement Learning for Playing Games
- Seminar Project: Playing Text-based games with Deep Reinforcement Learning
- Seminar Project: Helping a Deep Reinforcement Learning Agent with Natural Language Instructions to Play a Video Game
TAship
- Introduction to Machine Learning & Artificial Neural Networks, Ozyegin University, Spring 2013, Spring 2014, and Spring 2015.
- Introduction to Programming (Matlab), Fall 2014
- Discrete Mathematics, Ozyegin University, Fall 2014
- Computer Programming (Java),Ozyegin University ,Spring 2014
- Data Acquisition and Digital Control, Ozyegin University, Fall 2013,
- Introduction to Robot Programming, Ozyegin University, Spring 2013
- Physics Lab, Ozyegin University, Fall 2012, Fall 2014 Spring 2015
- Electrical Machine laboratory, University of Tehran, Spring 2009-10
- Programming for Mathematics and Statistics, Spring 2009
- Electrical Machine I, University of Tehran, Fall 2009
Trainings and Summer Schools
-
Gaussian Process Summer Schools: Gaussian Process, Bayesian Optimization, Kernel Design, Deep GP, Sheffield, UK Sep. 2019
-
ACAI Summer School on Reinforcement Learning: Temporal Abstraction, Deep RL, Multi-Agent, Off Policy RLs, Nieuwpoort, Belgium Oct. 2017
-
Winter School on Humanoid Robot Programming: ROS, YARP, Kinematics, Dynamics, Vision, Santa Margherita Ligure, Italy Feb. 2017
-
Robot Workshop: ROS, LBR iiwa KUKA and Care-O-Bot programming, Stuttgart, Germany Dec. 2016
-
KUKA robot Training: KUKA Simulation Software, Istanbul, Turkey Jan. 2014
Awards
- Gaussian Process Summer Schools Travel grant - MCAA EU Commission Sep. 2019
- Marie SkIodowska-Curie Fellowship - SECURE Project 2016-2019
- ICRA 2018 PhD forum travel grant award May 2018
- Accepted project to “Science is Wonder-ful! - European Researchers’ Night” event Sep. 2018