Mohammad Ali Zamani
Mohammad Ali Zamani
Home
Experience
Publications
Projects
Teaching
Trainings
Posts
Outreach
Talks/Workshops
Contact
Light
Dark
Automatic
human-robot interaction
SECURE Project
Safety Enables Cooperation in Uncertain Robotic Environments
Incorporating End-to-End Speech Recognition Models for Sentiment Analysis
Egor Lakomkin*
,
Mohammad Ali Zamani*
,
Cornelius Weber
,
Sven Magg
,
Stefan Wermter
On the Robustness of Speech Emotion Recognition for Human-Robot Interaction with Deep Neural Networks
Egor Lakomkin*
,
Mohammad Ali Zamani*
,
Cornelius Weber
,
Sven Magg
,
Stefan Wermter
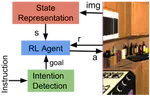
Language-modulated Actions using Deep Reinforcement Learning for Safer Human-Robot Interaction
Mohammad Ali Zamani*
,
Sven Magg
,
Cornelius Weber
,
Stefan Wermter
EmoRL: Real-time Acoustic Emotion Classification using Deep Reinforcement Learning
Egor Lakomkin*
,
Mohammad Ali Zamani*
,
Cornelius Weber
,
Sven Magg
,
Stefan Wermter
Robot that performs language instructions
Presented at European Researchers’ Night in the Parlamentarium, Brussels, Belgium.
Simultaneous Human-Robot Adaptation for Effective Skill Transfer
Mohammad Ali Zamani*
,
Erhan Oztop
CONVERGENT Project
Human Learning for Robot Skill GenerationT
Cite
×